https://market.android.com/details?id=com.myastro.compass

1. мһҗмқҙлЎң м»ҙнҢҢмҠӨлһҖ?
мһҗмқҙлЎң м»ҙнҢҢмҠӨлҠ” лӢӨмқҢкіј к°ҷмқҙ м •мқҳн• мҲҳ мһҲлӢӨ.
1. мӮ¬м „м Ғ мқҳлҜё
к°Җ. лӮҳм№Ёл°ҳ(зҫ…йҮқзӣӨ) : мһҗм№Ё(зЈҒйҮқ)мқҙ лӮЁл¶Ғмқ„ к°ҖлҰ¬нӮӨлҠ” нҠ№м„ұмқ„ мқҙмҡ©н•ҳм—¬ л°©н–Ҙмқ„ м•Ң мҲҳ мһҲлҸ„лЎқ л§Ңл“ кё°кө¬.
лӮҳ. compass : лӮҳм№Ёл°ҳ, лӮҳм№Ёмқҳ.
лӢӨ. Magnetic compass : мһҗкё°(зЈҒж°Ј) м»ҙнҚјмҠӨ[лӮҳм№Ёмқҳ].
лқј. gyro : gyrocompass. л°”нҖҙ, нҡҢм „мқҳ лң»мқҳ кІ°н•©мӮ¬.
л§Ҳ. gyrocompass : лӮҳм№Ёмқҳмқҳ н•ң к°Җм§Җ. мһҗмқҙлЎңм»ҙнҚјмҠӨ. нҡҢм „ лӮҳм№Ёл°ҳ.
кі мҶҚмңјлЎң нҡҢм „н•ҳлҠ” нҢҪмқҙлҘј мЈјмІҙлЎң н•ҳл©°, м§Җкө¬ мһҗкё°мҷҖлҠ” кҙҖкі„к°Җ м—ҶмқҢ.
мқјл°ҳм ҒмңјлЎң мһҗмқҙлЎң мҠӨмҪ”н”„лҘј кІҖмғүн•ҳл©ҙ лӢӨмқҢкіј к°ҷмқҖ нҡҢм „мқҳ кІ°кіјк°’мқҙ лӮҳмҳЁлӢӨ.

л¬јлЎ м•Ҳл“ңлЎңмқҙл“ң нҸ°мқҙлӮҳ м•„мқҙнҸ°м—җ лӢҙкІЁмһҲлҠ” мһҗмқҙлЎң м„јм„ң 칩мқҖ м•„лһҳмҷҖ к°ҷмқҖ 칩мңјлЎң кө¬м„ұ лҗҳм–ҙ мһҲлӢӨ.
м•„мқҙнҸ°4, Galaxy Tab, Galaxy S2м—җ нғ‘мһ¬лҗҳм–ҙ мһҲлҠ” мһҗмқҙлЎң м„јм„ң MEMS 칩мқҖ STMicroelectronicsмқҳ L3G4200D лӘЁлҚёмқҙлӢӨ.
лӢЁл§җм—җлҠ” лӢӨмқҢкіј к°ҷмқҖ к°ҒлҸ„лЎң мһҘм°©лҗҳм–ҙ мһҲлӢӨ.
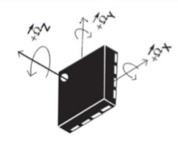
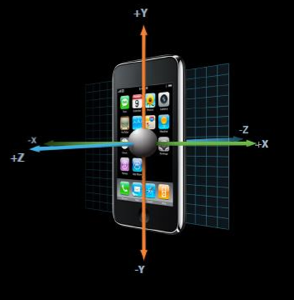
мқҙлҜём§Җ нҢҢмқјмқҖ м•„мқҙнҸ°4лҘј кё°мӨҖмңјлЎңн•ң лӘЁмҠөмқҙлӢӨ.
мң„мқҳ к·ёлҰјм—җм„ң X축 л°©н–ҘмқҖ Pitch к°ҒмҶҚлҸ„лҘј Y축 л°©н–ҘмқҖ Yaw к°ҒмҶҚлҸ„лҘј Z축 л°©н–ҘмқҖ Roll к°ҒмҶҚлҸ„лҘј лӮҳнғҖлӮёлӢӨ.
м•Ҳл“ңлЎңмқҙл“ң лӢЁл§җмӨ‘ к°ӨлҹӯмӢң нғӯмқҳ кІҪмҡ°, м•„мқҙнҸ° 4мҷҖ лҸҷмқјн•ң 축мңјлЎң к°ҒмҶҚлҸ„ к°’мқҙ лӮҳмҳӨм§Җл§Ң,
к°ӨлҹӯмӢң S2мқҳ кІҪмҡ°м—җлҠ” X축 Pitch к°ҒмҶҚлҸ„мҷҖ Y축 Yaw к°ҒмҶҚлҸ„к°Җ м„ңлЎң л°”лҖҢм—ҲлӢӨ.
мҰү, X축мқҖ Yaw к°ҒмҶҚлҸ„лҘј лӮҳнғҖлӮҙл©°, Y축мқҖ Pitchк°ҒмҶҚлҸ„лҘј лӮҳнғҖлӮёлӢӨ.
к°ӨлҹӯмӢң S2лҠ” Portrait(м„ёлЎң лӘЁл“ң) ліҙлӢӨ Lanscape(к°ҖлЎң лӘЁл“ң) мғҒнғңм—җм„ң Yaw к°ҒлҸ„лҘј лҚ” м„ёл°Җн•ҳкІҢ н‘ңнҳ„н•ҳкё° мң„н•ҙм„ң,
Gyroscope MEMES 칩мқҳ мң„м№ҳлҘј ліҖкІҪн•ң кІғмңјлЎң ліҙмқёлӢӨ.
(мҳҲлҘј л“Өм–ҙ м°Ёлҹүмҡ© Navigation appмқҳ кІҪмҡ°, м„ёлЎң лӘЁл“ң ліҙлӢӨ к°ҖлЎң лӘЁл“ңлҘј лҚ” л§Һмқҙ мӮ¬мҡ©н•ңлӢӨ.)
м–ҙмЁ“л“ кө¬кёҖм—җм„ңлҠ” м•„мқҙнҸ°кіј к°ҷмқҖ мһҘм°©мқ„ Recommendation н–Ҳм§Җл§Ң, м ңмЎ°мӮ¬(мӮјм„ұ)м—җм„ң ліҖкІҪн•ҳлҠ” мӮ¬н•ӯм—җ лҢҖн•ң к°•м ңм„ұмқҙ м—ҶмқҢмңјлЎң,
м•ұ к°ңл°ңмһҗлҠ” м„јм„ңмқҳ мһҘм°© 축м—җ лҢҖн•ҙм„ң кі л Өн•ҙм•ј н•ңлӢӨ. г… г…
лӢЁл§җ мғҒнғңк°Җ Portrait modeмқём§Җ Landscape modeмқём§Җм—җ лҢҖн•ҙм„ң мІҙнҒ¬н•ҳлҠ” л°©лІ•мқҖ
Android мқҳ Display apiлҘј мқҙмҡ©н•ҳлҠ” л°©лІ•(кө¬кёҖмқҖ мқҙ л°©лІ•мқ„ 추мІң н•Ё)кіј Accelerometer к°ҖмҶҚлҸ„ м„јм„ңлЎң л¶Җн„° м–»лҠ” л°©лІ•мқҙ мһҲлӢӨ.
мқҙм—җ лҢҖн•ҙм„ңлҠ” лӢӨмқҢм—җ м •лҰ¬н•ҙ ліҙлҸ„лЎқ н•ҳкІ лӢӨ.
2. м•Ҳл“ңлЎңмқҙл“ң Gyroscope Api
Gyroscope apiлҠ” мқҙм „м—җ н•ңлІҲ лӢӨлӨҳм—ҲлӢӨ.
Gravity Sensor(Accelerometer, Magnetic, Gyroscope)
кё°ліё Api л“ӨмқҖ кё°мЎҙ SensorManagerлҘј нҶөн•ҙм„ң Magnetic, Accelerometer Sensor м •ліҙлҘј м–»м–ҙмҳӨлҠ” л°©лІ•кіј лҸҷмқјн•ҳлӢӨ.
Gingerbreadм—җм„ңлҠ” мқҙ кё°л°ҳм—җм„ң Rotation VectorмҷҖ Linear Acceleration кё°мҲ мқҙ 추к°Җ лҗҳм—ҲлӢӨ.
мқҙ кё°мҲ мқҖ 2010л…„ н•ҳл°ҳкё°м—җ InvenSenseм—җм„ң л°ңн‘ңн•ң Rotation Vector, Linear Acceleration м—җм„ң м°Ёмҡ©н•ҙ мҳЁл“Ҝ н•ҳлӢӨ.
Sensor Fusion on Android Devices: A Revolution in Motion Processing
мқҙ PTлҘј ліҙл©ҙ м•Ҳл“ңлЎңмқҙл“ңм—җм„ңлҸ„ м• н”Ң iOSл§ҢнҒјмқҳ Gyroscopeкіјл Ё кё°мҲ л°ңм „мқҙ мһҲмқ„ кІғ мІҳлҹј ліҙм—¬ м§Җм§Җл§Ң,
мӢӨл§қмҠӨлҹҪкІҢлҸ„ Gingerbreadм—җ Rotation VectorмҷҖ Linear Acceleration кё°мҲ мқ„ л¶ҷмқҙкё°л§Ң н–Ҳм§Җ, мӢӨм ң кіөк°ңлҗң мҶҢмҠӨлҘј ліҙл©ҙ,
м „нҳҖ мһҗмқҙлЎң мҠӨмҪ”н”„мҷҖ м—°кі„лҗң мҶҢмҠӨлҠ” м—Ҷкі Magnetic sensorмҷҖ Accelerometer sensorлҘј Euler Angle кі„мӮ°лІ•м—җ мқҳн•ҙм„ң
нҡҢм „ л°©н–Ҙ(Heading)мқ„ кі„мӮ°н•ҳкі л§Ң мһҲлӢӨ.
(мқҙм—җ лҢҖн•ҙм„ң 2011л…„ мҙҲм—җ лӢӨлҘё к°ңл°ңмһҗл“Өмқҙ кө¬кёҖ мёЎм—җ л¬ёмқҳн•ң лӢөліҖмқҖ "м•„м§ҒмқҖ м§Җмһҗкё°мҷҖ к°ҖмҶҚлҸ„ м„јм„ңлҘј мқҙмҡ©н•ҳкі мһҲмңјл©°, м°Ёнӣ„м—җ мһҗмқҙлЎң лҚ°мқҙнғҖлҘј мӮ¬мҡ©н• кІғмқҙлӢӨ. кё°лӢӨл Ө лӢ¬лқј~" мҳҖлҚҳл“Ҝ н•ҳлӢӨ.)
кІ°көӯ кө¬кёҖмқҖ м• н”Ңмқҙ iOS4м—җ мһҗмқҙлЎң мҠӨмҪ”н”„лҘј нғ‘мһ¬н•ҳлӢҲк№җ, л¶Җлһҙл¶Җлһҙ Froyoм—җ мһҗмқҙлЎңмҠӨмҪ”н”„ кҙҖл Ё apiлҘј нғ‘мһ¬н•ҳкі ,
Gingerbreadм—җлҠ” apiлҘј ліҙк°•н•ңлӢӨкі н–Ҳм§Җл§Ң, кІ°көӯ ліҖн•ңкІғмқҖ н•ҳлӮҳлҸ„ м—Ҷм—ҲлӢӨ.
(н”„лЎңмҡ” кё°л°ҳмңјлЎң мһҗмқҙлЎңмҠӨмҪ”н”„к°Җ нғ‘мһ¬лҗң лӢЁл§җмқҖ к°ӨлҹӯмӢң нғӯмқҙ мң мқјн–ҲлҚҳкІғмңјлЎң кё°м–ө лҗЁ.)
Gingerbread м—җм„ң iOS4лҘј м«“м•„м„ң мһҗмқҙлЎң мҠӨмҪ”н”„лҘј м Ғмҡ©н•ңлӢӨл©ҙ, Rotation VectorлҘј нҶөн•ҙм„ң Quaternion мӮ¬мӣҗмҲҳ нҳ•нғңлЎң
мһҗмқҙлЎң м„јм„ң м •ліҙлҘј м–»м–ҙмҳӨкі , мқҙлҘј нҶ лҢҖлЎң Rotation MatrixлҘј кө¬н•ҳл ӨлҠ” мӢңлҸ„лҘј н–Ҳм–ҙм•ј н•ңлӢӨ.
кІ°көӯ api interfaceлҠ” л§Ңл“Өм—Ҳм§Җл§Ң, м•Ҳм—җ мұ„мӣҢ лҶ“м§ҖлҠ” лӘ»н–ҲлӢӨ.
Quaternionмқҳ кІҪмҡ° к°ҖлҒ” NaN(Not a Number) errorлЎң л°ңмғқ мӢңнӮЁлӢӨ.
м•„л§ҲлҸ„ acos(w) мІҳлҰ¬лҘј н•ҳл©ҙм„ң мһ…л Ҙк°’мқҙ rangeк°Җ -1.0 ~ +1.0 мқҙм–ҙм•ј н•ҳлҠ”лҚ° мқҙ rangeлҘј лІ—м–ҙлӮҳлҠ” к°’мқҙ л°ңмғқн•ҙм„ң лӮҳнғҖлҠ”кІғмқҙ м•„лӢҢк°Җ мүҪлӢӨ.
кІ°көӯ кө¬кёҖмқҖ л°©лІ•мқҖ WWDC 2010л…„м—җ iOS4 л°ңн‘ңмӢңм—җ Gyroscope Apiмқё CoreMotion лҘј л”°лқј н• л Өкі н•ҳлӢӨк°Җ мӢӨнҢЁн•ң кІғмңјлЎң ліҙмқёлӢӨ.
л¬ём ңлҠ” WWDC 2011л…„м—җ л°ңн‘ңн•ң iOS5м—җм„ңлҠ” CoreMotion кё°лҠҘмқҙ лҚ” ліҙк°• лҗҳм–ҙм„ң, мһ„мқҳмқҳ 축мқ„ кё°мӨҖмңјлЎң Motion Sensingн•ЁмңјлЎңм„ң
нҳ„мһ¬мқҳ Attitude(мһҗм„ё)лҘј мёЎм •н•ҳлҠ” кё°мҲ мқҙ лҚ”мҡұ н–ҘмғҒ лҗҳм—ҲлӢӨ.
м•„л§ҲлҸ„ кө¬кёҖмқҖ м „л°ҳм Ғмқё мһҗмқҙлЎң мҠӨмҪ”н”„ кҙҖл Ё apiлҘј мҲҳм •н• н•„мҡ”лҘј к·ёлӢӨм§Җ лҠҗлҒјм§Җ м•ҠлҠ”кІғ к°ҷлӢӨ.
мӢӨм ң мһҗмқҙлЎң мҠӨмҪ”н”„лҘј мқ‘мҡ©н•ң м•ұмқҙ м•Ҳл“ңлЎңмқҙл“ң л§Ҳмј“м—җлҠ” кұ°мқҳ м—ҶлӢӨ.
нҳ„мһ¬лҠ” iOSлҘј м«“м•„м„ң UX к°ңм„ л°Ҹ нғңлё”лҰҝ PC OSмқё honeycomb мқҙлӮҳ ice cream sandwich л§Ңл“ңлҠ”лҚ° м—ӯлҹүмқ„ 집мӨ‘н•ҳкі мһҲм–ҙм„ң
мһҗмӣҗмқҙ л¶ҖмЎұн•ң кІғмңјлЎң ліҙмқёлӢӨ.
мқҙлІҲ Google IO 2011мқ„ ліҙл©ҙ android 3.0кіј 4.0м—җм„ңлҠ” кө¬кёҖмқҳ мһҗмІҙ 2D 엔진мқё Skia libк°Җ iOSмқҳ 2DлҘј м«“м•„к°Җм§Җ лӘ»н•ҙм„ң,
2D AcceleratorлҘј opengles 2.0мқҳ shaderлҘј мқҙмҡ©н•ҳкІ лӢӨкі л°ңн‘ңн–ҲлӢӨ.
iOSмқҳ кІҪмҡ° к·ё м „л¶Җн„° Core UI лӮҳ Core Animation м—җм„ң iOSм—җ м»ӨмҠӨн„°л§Ҳмқҙ징лҗң bitblt 2D к°ҖмҶҚ칩мқ„ мӮ¬мҡ© н•ҳкі мһҲлӢӨ.
м•Ҳл“ңлЎңмқҙл“ңм—җм„ң Gyroscope apiлҠ” нҳ„мһ¬ м•„мЈј л§Һмқҙ л¶ҖмӢӨн•ҳлӢӨ.
н•ҳм§Җл§Ң, Raw dataмқё Yaw, Pitch, Roll dataл§Ңмқ„ мқҙмҡ©н•ҙм„ңлҸ„ кё°мҡёкё° мһҗм„ёлҘј 90лҸ„ лҳҗлҠ” 0лҸ„м—җ к°Җк№қкІҢ кё°мҡёмқё мғҒнғңм—җм„ң мёЎм •н• кІҪмҡ°,
м •нҷ•н•ҳкІҢ нҡҢм „ л°©н–Ҙмқ„ мёЎм •н• мҲҳ мһҲлӢӨ.
н•ҳм§Җл§Ң, мһҗм„ёмқҳ кё°мҡёкё°лҘј 30лҸ„ мқҙмғҒ кё°мҡём—¬м„ң лӢЁл§җмқ„ нҡҢм „ мӢңнӮ¬кІҪмҡ°, л°©н–Ҙ к°Ғмқҙ л¶Җ м •нҷ•н•ҳкІҢ лӮҳмҳЁлӢӨ.
мҰү, м •нҷ•н•ң л°©н–Ҙ к°Ғ(м„ мҲҳ л°©н–Ҙ, heading)мқ„ мёЎм •н•ҳкё° мң„н•ҙм„ңлҠ” X, Y, Z축м—җ лҢҖн•ҙм„ң к°ңл°ңмһҗк°Җ мһҗмІҙм ҒмңјлЎң Sensor Fusionмқ„ н•ҙм•ј н•ңлӢӨ.
мқҙл ҮкІҢ кө¬н•ң м„ мҲҳ л°©н–Ҙ к°Ғ headingмқҖ мғҒлҢҖ к°ҒлҸ„мһ„мңјлЎң, мһ„мқҳмқҳ кё°мӨҖ к°ҒлҸ„м—җ лҚ”н•ҙм„ң лӮҳм№Ёл°ҳмңјлЎң мӮ¬мҡ©н•ңлӢӨ.
мһ„мқҳмқҳ кё°мӨҖ к°ҒлҸ„лҠ” лӢӨмқҢкіј к°ҷмқҙ 2к°Җм§Җ л°©лІ•мқ„ нҶөн•ҙм„ң кө¬н• мҲҳ мһҲлӢӨ.
1. мһ„мқҳмқҳ кё°мӨҖ к°ҒлҸ„лҠ” Android Orientation Sensor(к°ҖмҶҚлҸ„ + м§Җмһҗкё°)лЎң л¶Җн„° м–»мқҖ мһҗл¶Ғ л°©н–Ҙ к°ҒлҸ„мқҳ кІ°кіјм—җм„ң нҺёк°Ғмқ„ ліҙм • н•ҙмӨҢмңјлЎңм„ң, 진л¶Ғ(True north, м •л¶Ғ) л°©н–Ҙ к°ҒлҸ„лҘј мқҙмҡ©н•ңлӢӨ.
2. мһ„мқҳмқҳ кё°мӨҖ к°ҒлҸ„лҠ” GPS CourseлЎң л¶Җн„° м–»мқҖ 진л¶Ғ(True north)лҘј кө¬н•ң к°ҒлҸ„лҘј мқҙмҡ©н•ңлӢӨ.
3. My App - Gyro Compass 3D
нҳ„мһ¬ м•Ҳл“ңлЎңмқҙл“ң л§Ҳмј“м—җ мҳ¬лқјмҷҖ мһҲлҠ” Gyroscope кҙҖл Ё appмқҳ кІҪмҡ°, м• н”Ңмқҳ App Store л§Ҳмј“м—җ мҳ¬лқјмҷҖ мһҲлҠ” к·ёкІғ ліҙлӢӨ л§Һмқҙ л¶ҖмӢӨн•ҳлӢӨ.
(к·ёл ҮлӢӨкі м ң м•ұмқҙ мўӢлӢӨлҠ” мқҙм•јкё°лҠ” м•„лӢҳ ^^;)
Gyro Compass 3Dм•ұмқҖ Android Orientation Sensor(к°ҖмҶҚлҸ„+м§Җмһҗкё°)лЎң л¶Җн„° м–»мқҖ к°ҒлҸ„(нҳ„мһ¬лҠ” мһҗл¶Ғ -г…Ғ-)м—җ Sensor Fusionн•ҙм„ң м–»мқҖ heading к°ҒлҸ„лҘј лҚ”н•ң лӮҳм№Ёл°ҳ м• н”ҢлҰ¬мјҖмқҙм…ҳмқ„ л§Ңл“Өм—ҲлӢӨ.
(Gyroscope + Accelerometer + Magnetic Sensor)
м•Ҳл“ңлЎңмқҙл“ң OS APIм—җм„ң Gyroscope кҙҖл Ё мӮ¬н•ӯмқҙ м§Җмӣҗмқ„ л¶ҖмӢӨн•ҳкё° л•Ңл¬ём—җ,
к°ңл°ңмһҗк°Җ м§Ғм ‘ Quaternion кі„мӮ° мҲҳмӢқмқ„ л§Ңл“Өкі , к°ҖмҶҚлҸ„ м„јм„ңмҷҖ м§Җмһҗкё° м„јм„ңлҘј мқҙмҡ©н•ң Fusionн•ҳ


